في سعيها الدؤوب لاستكشاف الكواكب البعيدة، تواجه المركبات الروبوتية على المريخ تحديات جمة، أبرزها طبيعة تضاريسه الرملية التي قد تعيق حركتها وتتسبب في جنوحها. استجابة لهذه المشكلة، طور مهندسون ألمان نوعًا مبتكرًا من الروبوتات الأرضية، يستلهم آلية حركته من سمكة الرمال الأفريقية، وهي زاحفة فريدة قادرة على "السباحة" عبر الرمال الصحراوية. هذه التقنية، التي تحاكي إحدى أغرب آليات الحركة في مملكة الحيوان، قد ترسم ملامح مستقبل استكشاف المريخ.
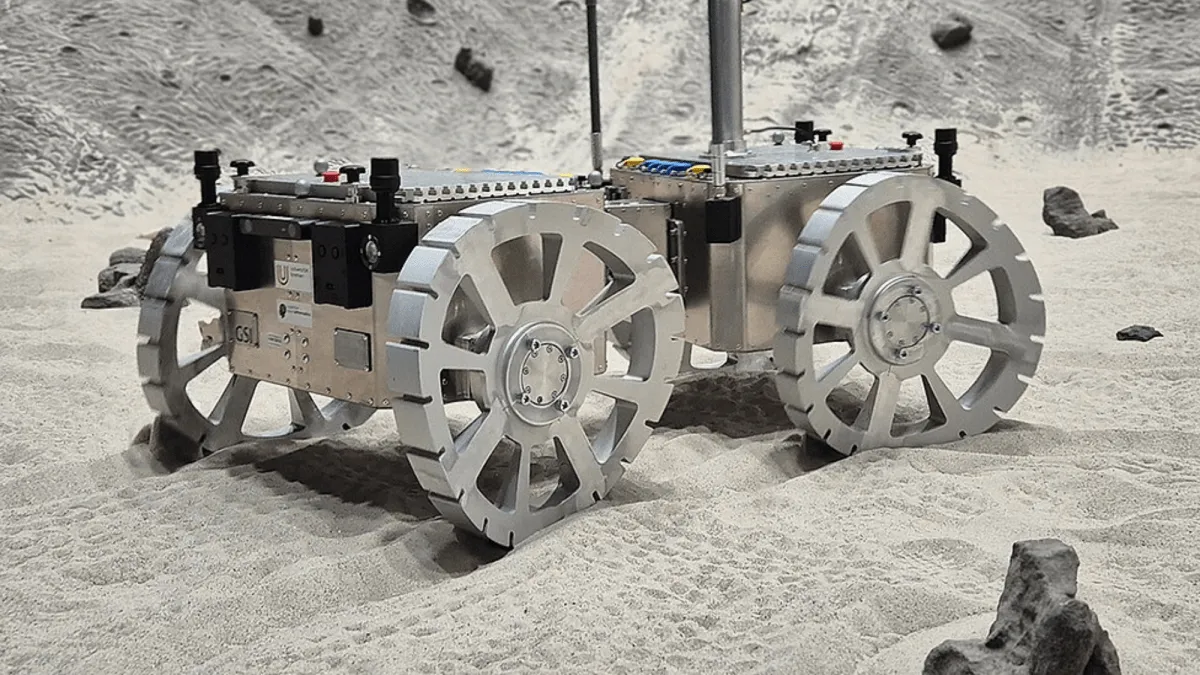
كشفت جامعة فورتسبورغ عن مقطع فيديو توضيحي للروبوت الجديد، الذي يشبه ثلاجة مصغرة بلون فضي، وهو يشق طريقه عبر أرضية اختبار تحاكي بيئة المريخ الرملية. بدلًا من الدوران التقليدي للعجلات، تقوم عجلات الروبوت الأربع بحركة تشبه الرقم ثمانية، مما يمكنها من اختراق الرمال بكفاءة. وقد نجح الروبوت في اجتياز عدة أمتار، ثم قام بالانعطاف والعودة إلى نقطة البداية، مظهرًا قدرة فائقة على المناورة في الأوساط الرملية.
ابتكار في تصميم عجلات الروبوت
آلية الحركة المستوحاة من سمكة الرمال
تستمد عجلات الروبوت المبتكر إلهامها من سمكة الرمال (Scincus scincus)، وهي زاحفة تعيش في الصحراء الكبرى وتشتهر بقدرتها على الغوص والتحرك داخل الرمال كأنها تسبح. هذه القدرة الفريدة على اختراق المواد الحبيبية، والتي تبدو كأنها سباحة فعلية، أصبحت نموذجًا لهندسة حركة جديدة للمركبات الفضائية. صرح أمينوسيس لوبيز، الباحث في جامعة فورتسبورغ، بأن العجلات تحاكي التفاعل المميز للزاحفة مع الأرض، مولدةً قوى طولية وجانبية تسمح بالتقدم.
تترك هذه العجلات مسارات متعرجة، أشبه بموجة جيبية، في الرمال أثناء حركتها. هذه الطريقة في الدفع تسمح للروبوت بالانزلاق عبر الرمال دون أن تغوص عجلاته أو تنزلق، وهي مشكلة شائعة تواجه المركبات ذات العجلات التقليدية في البيئات الرملية غير المستقرة. إن فهم كيفية تفاعل الكائنات الحية مع بيئاتها يوفر حلولاً هندسية مبتكرة للتحديات التي تواجه التقنيات الحديثة.

سمكة الرمال: الحل الطبيعي للرمال الزلقة
على الرغم من أن معظم الناس قد يربطون بين مركبات المريخ والرولات أو العجلات الدائرية، إلا أن هذه التصاميم ليست مثالية للبيئة الرملية القاسية وغير المتوقعة على المريخ. الرمال مادة فريدة تجمع بين خصائص المواد الصلبة والسائلة، مما يجعلها تشكل تحديًا كبيرًا للعجلات. بالإضافة إلى ذلك، غالبًا ما تضطر المركبات على الكوكب الأحمر إلى التعامل مع منحدرات شديدة وتضاريس غير مستوية، حيث يمكن لمستويات متفاوتة من الانزلاق أن تسبب اختلالًا في التوازن. وتعتبر بقع الرمال الأكثر ليونة كابوسًا للعجلات، مما يجعل خطر تعلق المركبة أمرًا واردًا.
لقد وجدت الطبيعة حلاً لهذه المشكلة منذ ملايين السنين، وهو يتمثل في سمكة الرمال. على عكس اسمها، فإن هذه الزاحفة الصحراوية تنتمي إلى فصيلة السقنقورية. فوق سطح الأرض، تستخدم سمكة الرمال أرجلها الصغيرة للتنقل، لكن الأمور تصبح أكثر إثارة للاهتمام عندما تبدأ في الحفر تحت الرمال. تظهر صور الأشعة السينية أن سمكة الرمال تدفع نفسها إلى الأمام تحت الرمال، مستخدمةً حركة تلوح قوية لتوليد الدفع والتغلب على مقاومة الرمال. النتيجة تشبه حيوانًا يسبح عبر الرمال، بطريقة مشابهة جدًا لكيفية تأرجح السمكة لجسمها للحركة عبر الماء.

تطوير روبوتات مستوحاة من سمكة الرمال
قام مهندسون في معهد جورجيا للتكنولوجيا، مستفيدين من هذه الملاحظات، بإنشاء روبوت خاص بهم مستوحى من سمكة الرمال في عام 2011. أظهرت الاختبارات التي أجريت على هذه الروبوتات أن الشكل الموتّر لرأس الزاحفة يساعدها في توليد قوى رفع، مما يسهل عليها السباحة عبر الرمال. هذه الأبحاث تسلط الضوء على أهمية دراسة البيولوجيا والبيوميكانيك لإيجاد حلول هندسية مبتكرة.
لقد أثبتت أبحاث مشابهة أن طريقة حركة سمكة الرمال، والتي تتضمن تحريك الجسم بشكل موجي، فعالة جدًا في تقليل الاحتكاك وزيادة قوة الدفع في الأوساط الحبيبية. يهدف تصميم العجلات الجديد إلى محاكاة هذه الحركة التموجية، مما يسمح للروبوت بالتقدم بثبات عبر التضاريس الرملية الصعبة التي قد تتسبب في غرق أو انزلاق المركبات التقليدية.

التحديات المستقبلية والتطبيق العملي
عند مقارنة أداء الروبوت المستوحى من سمكة الرمال بنموذج ذي عجلات تقليدية على مسار اختبار رملي، وجد الباحثون أن الروبوت الجديد تفوق بشكل ملحوظ. فبينما كانت العجلات المستديرة تتأرجح وتتمايل، حافظت العجلات المتذبذبة على استقرار نسبي. لم تكن هذه التقنية ناجحة من المحاولة الأولى، حيث أن النماذج المبكرة كانت ثقيلة جدًا لدرجة أنها كانت تغوص في الرمال. اضطر الفريق إلى إعادة التصميم، وزيادة عرض كل عجلة وتقليل الكتلة الإجمالية للمركبة.
من غير المرجح أن تصبح هذه العجلات الغريبة هي النظام الرئيسي لمركبات ناسا في المستقبل القريب، على الأقل ليس في الوقت الحالي. لا يزال هناك المزيد من العمل المطلوب لزيادة قابلية التحكم بها بشكل عام، ومعالجة مشكلة الانزلاق التي قد تحدث في البيئات الواقعية المعقدة. كما يجب أخذ متغيرات إضافية في الاعتبار، مثل استيعاب الأدوات العلمية وغيرها من الحمولات التي قد تحتاج المركبة إلى حملها.
لكن هذا التصميم يمثل شهادة على براعة سمكة الرمال الطبيعية وهداياها التطورية. بدأ العديد من العلماء مؤخرًا في تقدير هذه السمات حقًا، وما يمكن أن تلهمه من تقنيات أخرى. إن فهم آليات الحركة البيولوجية يفتح آفاقًا واسعة لتطوير روبوتات أكثر كفاءة وقدرة على استكشاف البيئات القاسية.