
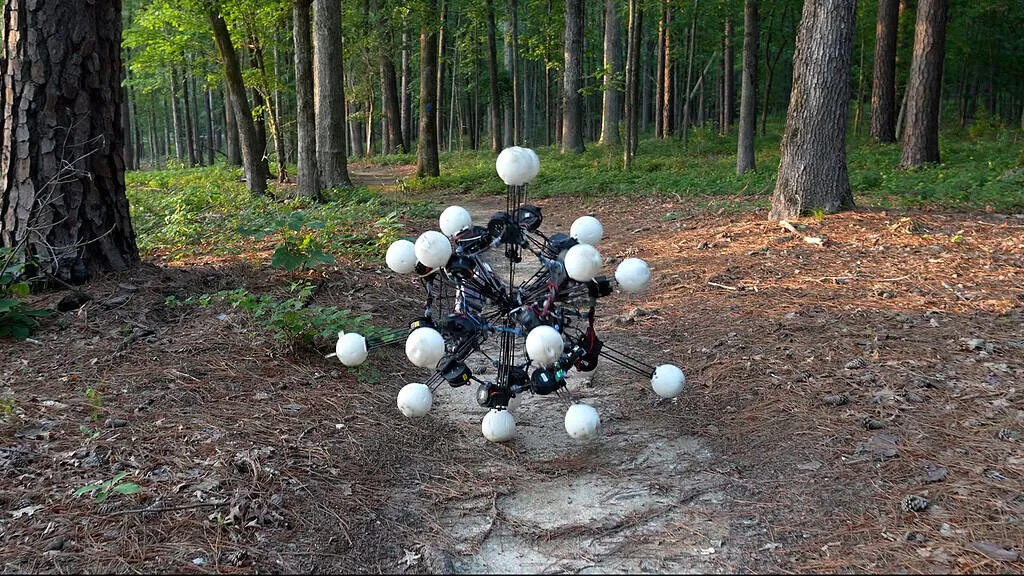
في عالم الروبوتات المتسارع، غالبًا ما نرى آلات تحاكي الأشكال البيولوجية، إما على هيئة بشرية أو شبيهة بالحيوانات، بهدف تيسير حركتها وأدائها في بيئات معينة. لكن دراسة حديثة من جامعة ديوك تكسر هذا القالب التقليدي، مقدمةً روبوتًا فريدًا يُدعى "آرجس" (Argus)، يتميز بتصميمه الكروي غير المتجانس، والذي يتخلى عن مفهوم الأمام والخلف، ويتحدى الأساليب المعتادة في هندسة الروبوتات. بدلًا من السير أو الركض، يتحرك "آرجس" عن طريق التدحرج والاندفاع باستخدام 20 ساقًا قابلة للتمدد، كل ساق مزودة بكاميرا عمق، مما يمنحه رؤية شاملة تقريبًا للعالم المحيط به.
ما يميز "آرجس" بشكل خاص هو قدرته العالية على التكيف مع أي اتجاه. فبدلًا من التركيز على تصميم روبوت يحاكي الحركات البيولوجية، يطرح الباحثون في جامعة ديوك مفهومًا جديدًا لتصميم الروبوتات يرتكز على مبدأ "اللامركزية الديناميكية" (Dynamic Isotropy). يقيس هذا المبدأ مدى قدرة الروبوت على الدفع والتسارع والاستجابة بشكل متساوٍ في جميع الاتجاهات. هذا النهج الثوري يفتح آفاقًا جديدة في تطوير روبوتات أكثر مرونة وقدرة على العمل في بيئات معقدة وغير متوقعة، بغض النظر عن اتجاهها.
مفهوم "اللامركزية الديناميكية": استراتيجية جديدة لتصميم الروبوتات
لطالما استلهم علم الروبوتات من الكائنات الحية لتطوير آلات قادرة على الحركة. الروبوتات الشبيهة بالبشر تحاكي الأطراف البشرية، والروبوتات الرباعية تستلهم من الكلاب والخيول، بينما تستوحي الروبوتات الزاحفة من الحشرات. وبينما أثمرت هذه المناهج عن آلات متقدمة، إلا أنها تحمل معها تحيزات تصميمية. غالبًا ما يبدأ المصممون بالسؤال: أي حيوان يجب أن يشبه الروبوت بناءً على مهمته؟
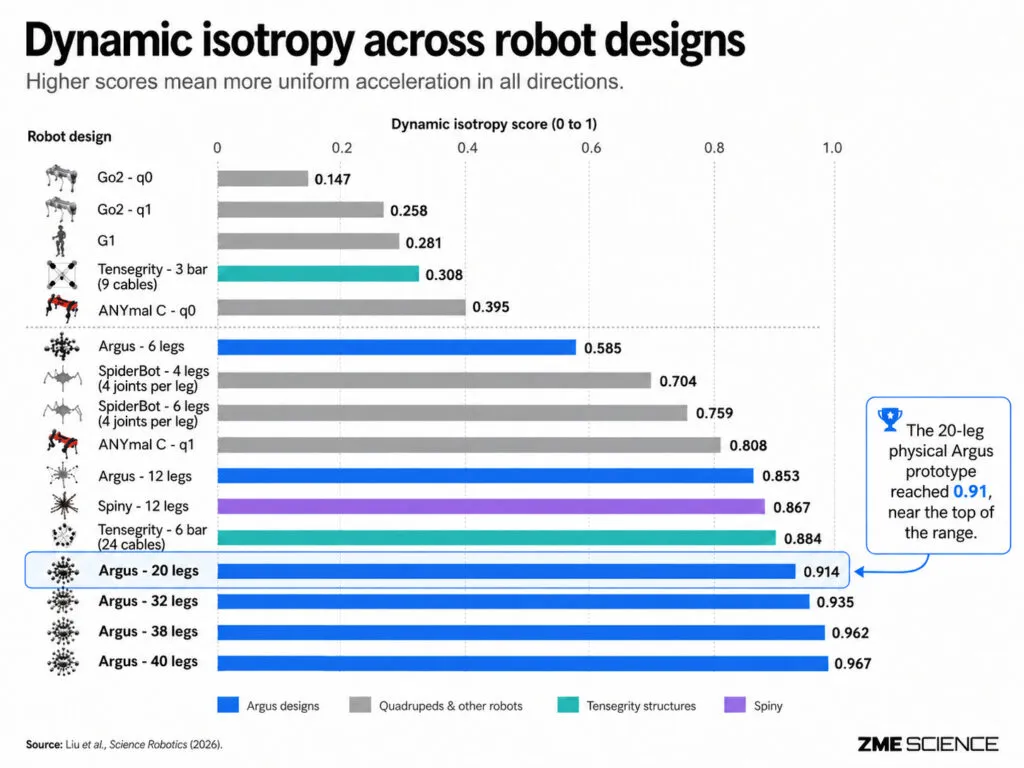
لكن فريق جامعة ديوك طرح سؤالًا مختلفًا: ماذا لو كان الشكل الأمثل للروبوت هو الشكل الذي يمكنه التصرف بأكبر قدر من التساوي في جميع الاتجاهات؟ يطلقون على هذا المفهوم اسم "اللامركزية الديناميكية"، وهو مقياس يقدر مدى قدرة مركز كتلة الروبوت على التسارع بشكل متساوٍ في أي اتجاه. تشير الأبحاث إلى أن العديد من الروبوتات المألوفة، بما في ذلك الروبوتات الرباعية المتقدمة، والروبوتات الشبيهة بالبشر، والطائرات بدون طيار التقليدية، تسجل أقل من 0.6 في هذا المقياس. في المقابل، حقق "آرجس" درجة مذهلة بلغت 0.91.
إن إمكانية تحقيق درجات أعلى من "اللامركزية الديناميكية" قد تتطلب تصميمات تضم ما يصل إلى 40 ساقًا، لكن هذه التصميمات تكون أقل عملية في النماذج الأولية بسبب زيادة التعقيد والمخاطر. يقول بويوان تشين، مدير مختبر ديوك للروبوتات العامة والمؤلف المشارك للدراسة: "عندما يستطيع الروبوت التسارع بالتساوي في كل اتجاه، فإنه يتوقف عن الحاجة إلى مواجهة العالم في اتجاه معين. الأمام والخلف يصبحان متشابهين، واليسار واليمين يصبحان متشابهين. المشكلة برمتها في التحكم بالروبوت تتغير طبيعتها."
"آرجس": روبوت لا يحتاج إلى الاستدارة
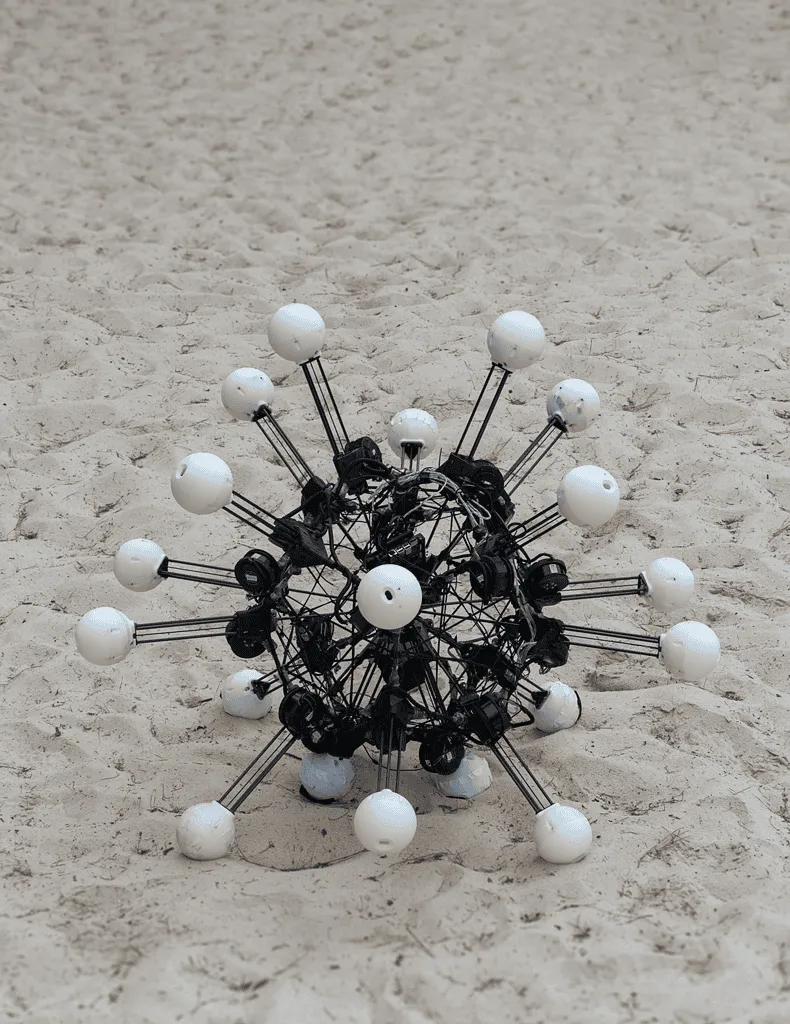
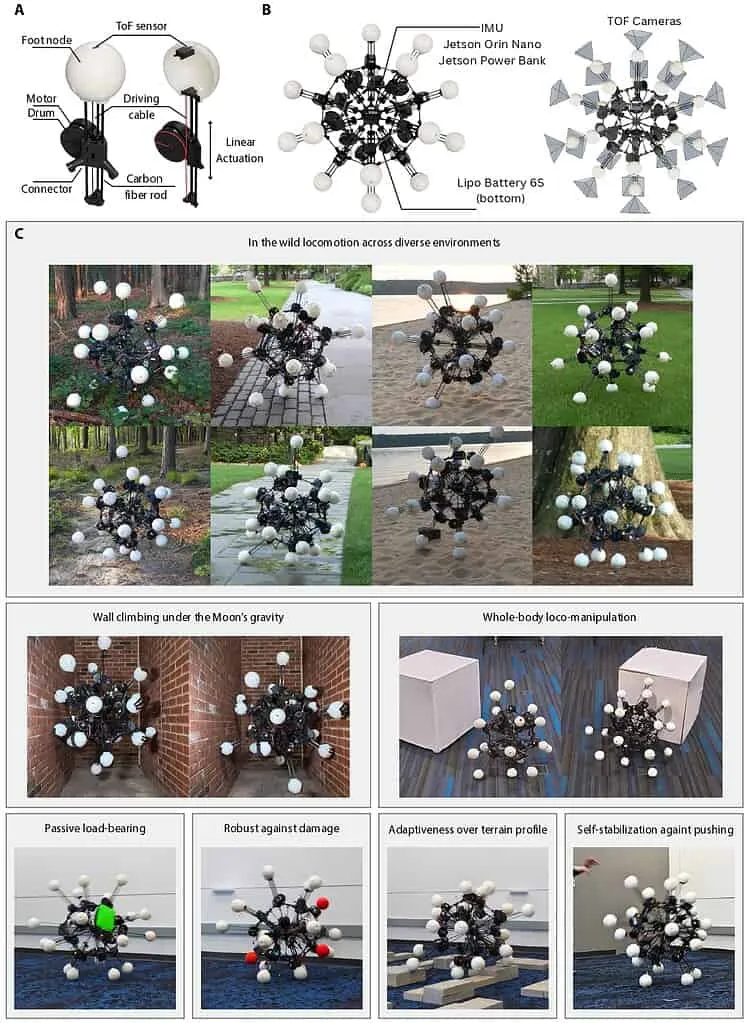
للوصول إلى هذا التصميم الفريد، أجرى الفريق أكثر من 1500 محاكاة لتصميمات روبوتات مختلفة. نتج عن ذلك نموذج أولي مادي يضم 20 ساقًا متطابقة موزعة حول هيكل مركزي يعتمد على شكل الاثنا عشر وجهي المنتظم (Dodecahedron)، وهو شكل هندسي ذو 12 وجهًا. كل ساق تنبعث للخارج من المركز، تشبه أشواك قنفذ البحر، ولكن بدون أن تتحرك مثله.
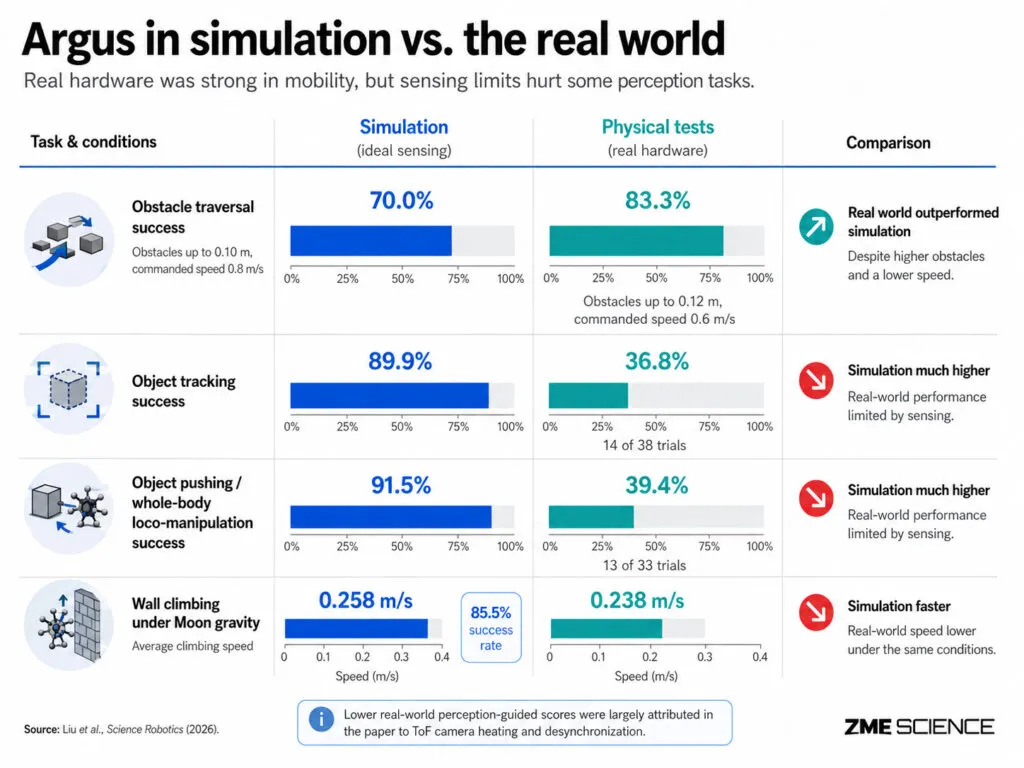
في الاختبارات، أظهر "آرجس" قدرات مدهشة. فقد تدحرج بنجاح على الخرسانة، والعشب، والأغصان، والأراضي الوعرة، والرمال الناعمة، والأسطح المبللة الزلقة. تمكن من تجاوز عوائق يصل ارتفاعها إلى حوالي خمس بوصات. واستمر في العمل حتى بعد تعطيل ساق واحدة، أو اثنتين، أو حتى ثلاث سيقان. والأهم من ذلك، أنه استطاع حمل حمولة بوزن 10 أرطال مثبتة على أحد جوانبه مع الحفاظ على معظم سرعته المحددة.
عند دفعه، لم ينقلب "آرجس" ببساطة. بل قام بتمديد السيقان على الجانب المقابل لدعم نفسه. وفي اختبارات التسلق على الجدران في ظروف تحاكي جاذبية القمر، استخدم بعض السيقان للدفع مقابل الجدران المتوازية، بينما استخدمت سيقان أخرى للدفع للأعلى. ساعد هذا التصميم أيضًا "آرجس" في الرؤية، حيث تقوم كاميرات العمق الموجودة في كل ساق ببناء صورة ثلاثية الأبعاد تقريبية للبيئة، بغض النظر عن دوران الروبوت. سمح له ذلك بتتبع ودفع مكعب بطول متر أثناء تدحرجه، وهي مناورة يصعب تنفيذها لروبوت ذي تصميم أمامي ثابت.
ومع ذلك، فإن "آرجس" لا يزال ليس جاهزًا للانتشار في مناطق الكوارث أو استكشاف القمر. في اختبارات تتبع ودفع الأشياء الواقعية، انخفضت معدلات نجاحه بشكل حاد مقارنة بالمحاكاة، ويرجع ذلك أساسًا إلى ارتفاع درجة حرارة كاميرات قياس وقت الرحلة (Time-of-Flight) وعدم تزامنها أثناء التجارب المتكررة. زيادة عدد السيقان تعني زيادة المشغلات (Actuators)، وزيادة الوزن، وزيادة متطلبات التحكم، والمزيد من الأجزاء المعرضة للفشل.
يدرك الباحثون هذه المقايضات. الهدف ليس جعل كل الروبوتات المستقبلية تشبه "آرجس"، بل التأكيد على أن تصميم الروبوتات يمكن أن يستفيد من مقياس تصميم جديد. وفي الوقت الحالي، يسعى الفريق إلى سد الفجوة بين الأداء المتوقع من المحاكاة والنتائج الفعلية في العالم الحقيقي.
يقول بوكسي شيا، باحث ما بعد الدكتوراه في ديوك والمؤلف المشارك: ""آرجس" هو دليل على الوجود. إنه يثبت أن التصميم من أجل التناظر الديناميكي ليس مجرد فضول نظري، بل ينتج روبوتًا يمكنك نشره في البرية، على تضاريس وعرة، وفي بيئات مزدحمة، وحتى في بيئات ذات جاذبية منخفضة. إنه يغير ما هو ممكن."
مع انتقال الروبوتات من المختبرات النظيفة وأرضيات المصانع إلى الغابات، المباني المنهارة، المناجم، المزارع، والتضاريس خارج كوكب الأرض، تصبح التصميمات المبتكرة مثل "آرجس" أكثر جاذبية. في تلك الأماكن، قد لا يملك الروبوت الوقت الكافي للوقوف، أو الاستدارة، أو اختيار جانبه الأمثل. قد يحتاج ببساطة إلى التصرف.
يقترح "آرجس" أن مستقبل الروبوتات قد لا يكون أكثر شبهاً بالبشر، بل قد يكون أغرب، وأكثر استدارة، وأقل اعتمادًا على التقليد البيولوجي، وأكثر اعتمادًا على الرياضيات والفيزياء البحتة.
تحليل الأثر
يمثل روبوت "آرجس" تحولًا جذريًا في فلسفة تصميم الروبوتات. فمن خلال الابتعاد عن محاكاة الأشكال البيولوجية واعتماد مبدأ "اللامركزية الديناميكية"، يفتح هذا التصميم الباب أمام آلات تتمتع بقدرة فائقة على التكيف والمرونة في البيئات المعقدة وغير المتوقعة. هذا النهج قد يكون حاسمًا في تطوير روبوتات قادرة على أداء مهام الإنقاذ في المناطق المنكوبة بالكوارث، والاستكشاف في البيئات القاسية مثل الكواكب الأخرى، والعمل بكفاءة في مجالات الزراعة والصناعة التي تتطلب تنوعًا في الحركة. إن القدرة على الدفع والتسارع والاستجابة بشكل متساوٍ في جميع الاتجاهات تقلل من الاعتماد على التوجيه والتحكم المعقد، مما يبسط تصميمات الروبوتات ويجعلها أكثر قوة وقدرة على التحمل. وعلى الرغم من التحديات الحالية المتعلقة بالتبريد والتزامن، إلا أن "آرجس" يمثل خطوة أولى واعدة نحو جيل جديد من الروبوتات الأكثر فعالية واستقلالية.




